应用场景
机器人仿真与AI训练
仿真数据生成与标注
工业数字孪生
工业自动化方案
游戏与XR
实时特效
机器人仿真与AI训练
仿真数据生成与标注
工业数字孪生
工业自动化方案
游戏与XR
实时特效
具身智能
仿真平台
MotrixSim通过Motphys专有物理引擎提供极其精确的仿真:支持广义坐标和多体物理建模,并采用隐式求解器,实现更精确的驱动模型和更优秀的动态稳定性。我们的工具链覆盖从训练、验证到部署的完整流程,提供全面解决方案,显著加快开发周期。此外,MotrixSim支持高质量合成数据的生成,降低标注成本并涵盖罕见场景。为加速训练效率,我们还推出了GPU版本,支持多世界的并行训练。
了解更多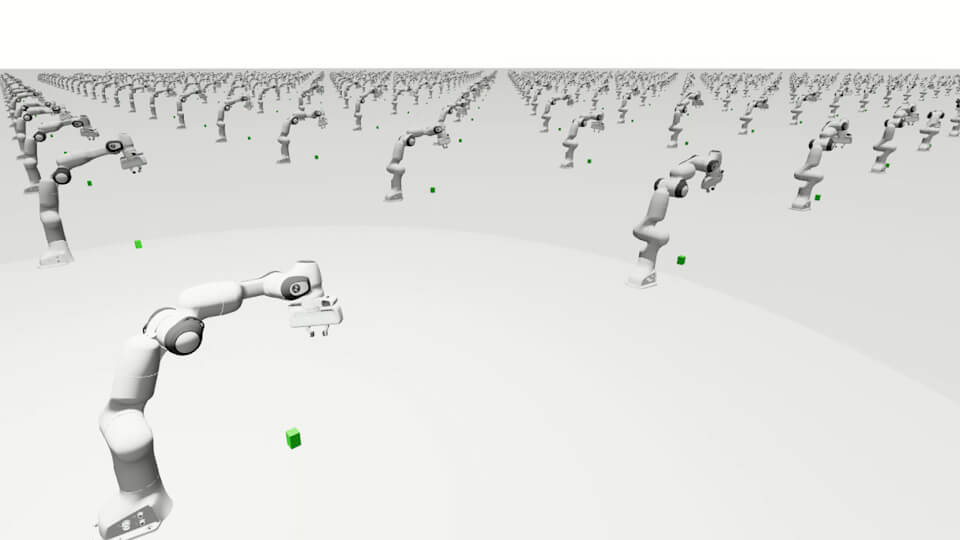
机器学习框架
Morphos Labs是一个构建于MotrixSim之上的机器学习框架,集成多种机器学习库和算法,支持广泛的机器学习任务。框架中整合了专门定制的管线,例如针对机器人运动(locomotion)训练的强化学习管线,以及用于数据合成的定制管线等。这些高度优化的流程使得开发者可以更高效地进行实验和产品开发。
联系我们工业仿真

高精度实时工业仿真
提供的高保真物理模拟专为实时工程应用设计,可确保工业设备和流程的精确再现。支持基于广义坐标的多体物理建模及摩擦接触仿真,适用于具有复杂接触与摩擦特性的机械系统。此外,还支持风力、浮力、履带、绳缆、软体及断裂等物理现象的仿真。在虚拟环境中能够准确重现各类物理现象,为工业自动化控制系统提供有力支持,为构建全面的工业数字孪生模型提供必要的工具集。
联系我们游戏和创意

刚体物理模拟
提供高性能的刚体物理模拟,能够精确处理物体之间的碰撞检测与响应,支持多种几何形状的高效交互计算。动力学模拟准确再现了物体在受力情况下的行为,包括重力、摩擦力及惯性的影响。提供多种类型的关节和约束,支持构建复杂的机械结构及其物理连接关系。此外,场景查询功能如射线检测和重叠检测等,为逻辑处理和物理交互提供了高效可靠的支撑。
了解更多
GPU粒子系统
借助GPU的并行计算优势,我们能够迅速地模拟大规模粒子的动态行为和互动,从而再现真实世界中的各种复杂物理现象。统一解算框架能够处理包括布料、毛发、软体和流体在内的多种物理材质,并支持这些不同材质之间的交互效果。Shader转译和RHI的跨平台设计允许在各种GPU平台上进行编译和部署,包括各类移动设备的GPU。
联系我们
兼容性
引擎产品适配了各种主流的宿主环境,包括Unity、Unreal、Web和Python等,同时我们也提供了C API以便兼容任意宿主环境。我们的产品对多种操作系统,包括Windows、Linux、macOS、Android、iOS以及鸿蒙等,都有良好的兼容性。同时支持多种设备,包括但不限于PC、工作站、服务器和移动设备等,以及各种CPU(如Arm和x64)和支持Vulkan的各种GPU。
联系我们
工具链和优化
我们提供了一套完整的工具链,旨在帮助开发者更高效地进行内容创作。这套工具链包括可视化展示和编辑工具,调试工具,以及性能分析工具。此外,我们的引擎采用Rust语言,它在多线程和安全性方面现出色;经过深度的算法和工程优化,能够颠覆性地实现高精度、大规模的实时模拟。
联系我们云计算

分布式物理
实时动作物理模拟的分布式计算,成功解决了大规模物理模拟在单机上遇到的算力瓶颈问题。借助这项技术,我们能够构建大规模云端物理仿真环境,为大规模并行AI模型训练提供强大支持;另一方面,元宇宙作为一个庞大的虚拟世界,将涌入大量参与者,形成一个大规模用户实时交互的场景,需要进行超大规模的物理仿真,而现在,这已经成为可能。
联系我们
跨端确定性
在设计阶段,我们就将跨端确定性作为引擎的核心设计目标,并在每一行代码中都进行了考虑和验证。这使得我们在行业内率先实现了跨终端、跨平台的动作物理模拟中浮点数计算结果的完全一致性。因此,用户可以在多个设备或平台上获得一致的仿真结果。此外,这也使得在异构设备上进行分布式算力动态调配成为可能。
联系我们