为什么选择MotrixSim
解决Sim2Real问题的根本在于让物理仿真算法更贴近现实世界。MotrixSim通过自主研发的高性能物理引擎,在多个关键领域进行了优化,力求缩小仿真与现实之间的差距。
精确模拟现实世界的物理算法
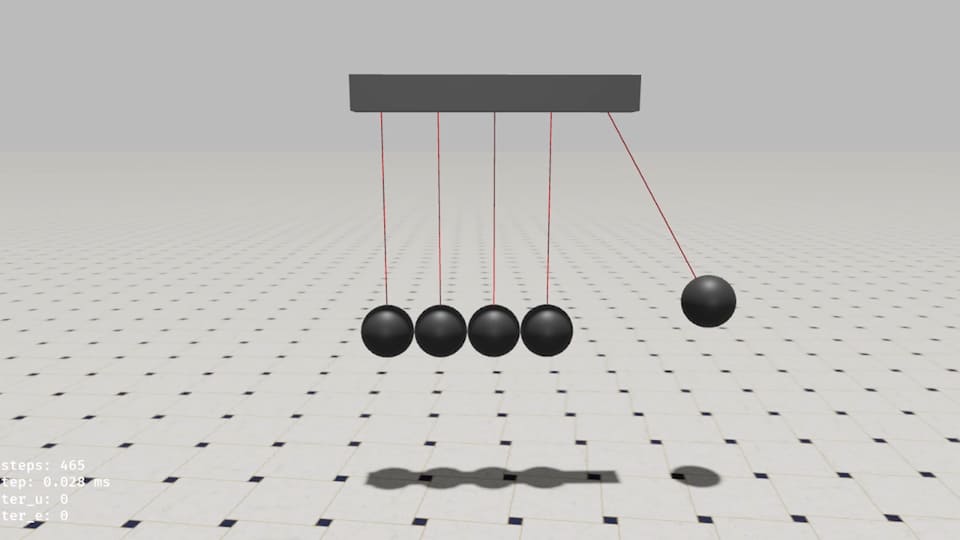
牛顿摆模拟


重力陀螺模拟
大规模静态接触测试
大时间步长下算法的稳定性
10ms 时间步长模拟下依旧稳定
稳定的大时间步长算法允许在模拟过程中使用较大的时间间隔,从而减少每秒所需的计算步骤数。这不仅加快了仿真速度,还降低了计算资源的需求,对于实时模拟和大规模仿真的性能优化尤为重要。
迈向虚实无缝迁移
Sim2Real 无缝迁移
依托于自研物理引擎的种种改进,我们成功在MotrixSim中训练了Unitree Go1,并将其部署到真机上进行验证。值得注意的是,在这个行走任务中,我们没有进行任何后处理,初步实现了从虚拟环境到现实世界的无缝迁移。这一成果也一定程度上表明,解决Sim2Real问题高度依赖于物理仿真算法的不断改进。
为什么选择MotrixSim
解决Sim2Real问题的根本在于让物理仿真算法更贴近现实世界。MotrixSim通过自主研发的高性能物理引擎,在多个关键领域进行了优化,力求缩小仿真与现实之间的差距。
精确模拟现实世界的物理算法
牛顿摆模拟
牛顿摆是由一系列等质量的小球悬挂于一条线上构成的装置,当一个小球被拉起并释放时,它会撞击其他静止的小球,导致另一端的小球弹出,同时保持系统的总能量守恒。正确模拟牛顿摆的关键在于精确的能量传递和碰撞响应,这需要高度准确的能量守恒算法以及精细的碰撞检测和响应机制。
重力陀螺模拟
重力陀螺的进动与章动仿真可用于评估物理引擎在接触点处理和角动量模拟方面的准确性。MotrixSim在仿真中表现出高度一致的理论行为,而MuJoCo中的陀螺在仿真过程中出现了不规则的位移现象。这种对动力学的精确还原能力,可以为Sim2Real的系统识别和优化提供可靠依据,显著降低从仿真到部署的调试成本与迭代周期。
大规模静态接触测试
货架场景中大量商品密集摆放并处于静态接触状态,可用于评估物理引擎在密集接触建模中的稳定性与准确性。MotrixSim在处理大量物体接触时表现稳定,而MuJoCo在此场景中产生了严重的物体抖动现象。对大规模静态接触场景的高精度仿真能力,可为仓储物流等实际应用提供可靠支撑。
大时间步长下算法的稳定性
10ms 时间步长模拟下依旧稳定
稳定的大时间步长算法允许在模拟过程中使用较大的时间间隔,从而减少每秒所需的计算步骤数。这不仅加快了仿真速度,还降低了计算资源的需求,对于实时模拟和大规模仿真的性能优化尤为重要。
迈向虚实无缝迁移
Sim2Real 无缝迁移
依托于自研物理引擎的种种改进,我们成功在MotrixSim中训练了Unitree Go1,并将其部署到真机上进行验证。值得注意的是,在这个行走任务中,我们没有进行任何后处理,初步实现了从虚拟环境到现实世界的无缝迁移。这一成果也一定程度上表明,解决Sim2Real问题高度依赖于物理仿真算法的不断改进。
关键特性
MotrixSim 提供高性能高精度仿真技术,支持广义坐标和多体物理建模,并采用隐式求解器,实现更精确的驱动模型和更优秀的动态稳定性。
物理仿真
支持完整的刚体动力学仿真功能,涵盖转动惯量、摩擦力等物理特性模拟,并配备高精度碰撞检测算法,可处理复杂几何体间的实时碰撞响应,确保虚拟环境中的物理交互真实可信。
高性能计算
CPU版本基于Rust开发,提供出色的性能和内存安全性,实现稳定可靠的仿真性能。
全新求解器
自主研发的多体动力学求解器,通过改进的约束方程建模方法与隐式积分算法,在保证数值稳定性的同时显著提升计算效率,适用于高自由度系统的实时仿真需求。
广义坐标建模
采用基于广义坐标的多体系统建模,支持复杂的拓扑结构定义,内置关节约束类型,可精确描述机器人、机械臂、车辆悬挂系统等复杂运动链的运动学与动力学特性。
Python API
提供简洁易用的Python接口封装,开发者可通过函数调用完成模型构建、仿真控制与数据交互,便于快速开发和原型制作。
机器人支持
专门优化的机器人仿真功能,兼容URDF/MJCF模型格式,辅助机器人算法开发与基础测试场景构建。